Mémoire (2013-2015): Spatial Allocation in Swarm Robotics
Actuellement: Doctorant en Machine Learning
Qu’est-ce que c’est?
Swarm Intelligence
“Swarm intelligence is the discipline that deals with natural and artificial systems composed of many individuals that coordinate using decentralized control and self-organization.”
“Self-organization is a process in which pattern at the global level of a system emerges solely from numerous interactions among the lower-level components of the system. Moreover, the rules specifying interactions among the system’s components are executed using only local information, without reference to the global pattern”
Gerardo Beni. From swarm intelligence to swarm robotics. In Swarm Robotics, pages 1-9. Springer, 2005.
Reynolds, Craig W. “Flocks, herds and schools: A distributed behavioral model.” ACM SIGGRAPH computer graphics. Vol. 21. No. 4. ACM, 1987. http://www.red3d.com/cwr/boids/
Synchronisation des metronomes
Synchronisation des lucioles
Comment ça marche?
while(True):
counter +=1
# Signaling part
if counter > T:
signal
counter = 0
# Synchronization
if signal_detected:
counter += alpha * counter
Examples - Artificiels
Robotique en essaim
“Swarm robotics is the study of how to design groups of robots that operate without relying on any external infrastructure or on any form of centralized control. In a robot swarm, the collective behavior of the robots results from local interactions between the robots and between the robots and the environment in which they act”
M. Brambilla, E. Ferrante, M. Birattari, and M. Dorigo. Swarm robotics: a review from the swarm engineering perspective. Swarm Intelligence, 7(1):1-41, 2013.
Propriètes desirées:
Tolerance au défauts
Scalabilité
Flexibilité
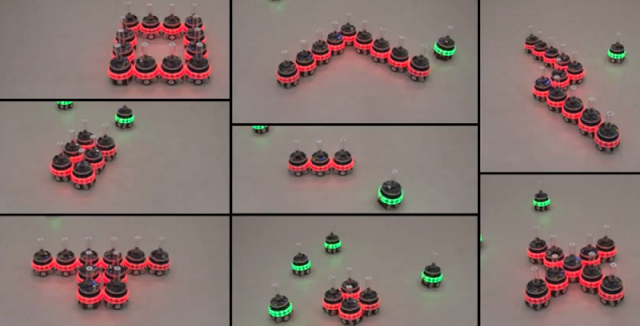
Transport collectif
Auto-assemblage
Essaim héterogène
ACO
Ant colony optimization (ACO) is a population-based metaheuristic that can be used to find approximate solutions to NP-hard optimization problems.




Comment ça marche?
Reynolds, Craig W. “Flocks, herds and schools: A distributed behavioral model.” ACM SIGGRAPH computer graphics. Vol. 21. No. 4. ACM, 1987. http://www.red3d.com/cwr/boids/